Opěrná stěna¶
from __future__ import print_function
import openturns as ot
from openturns.viewer import View
import math as m
from collections import OrderedDict
import re
import matplotlib.pyplot as plt
import numpy as np
%matplotlib nbagg
def plot_grid(marginals, inp, out, DP=None):
n = len(marginals)
fig, ax = plt.subplots(nrows=int((n-1)*n/2), ncols=1, figsize=(4, n*4), tight_layout=True)
k = 0
for i in range(n-1):
for j in range(i+1, n):
mask = out[:,0] < 0
ax[k].plot(inp[:, i][~mask], inp[:, j][~mask], 'g.', ms=1)
ax[k].plot(inp[:, i][mask], inp[:, j][mask], 'r.', ms=1)
ax[k].set_xlabel(marginals[i].getDescription()[0])
ax[k].set_ylabel(marginals[j].getDescription()[0])
if DP:
ax[k].plot(DP[i], DP[j], 'co')
k+=1
Výpočet¶
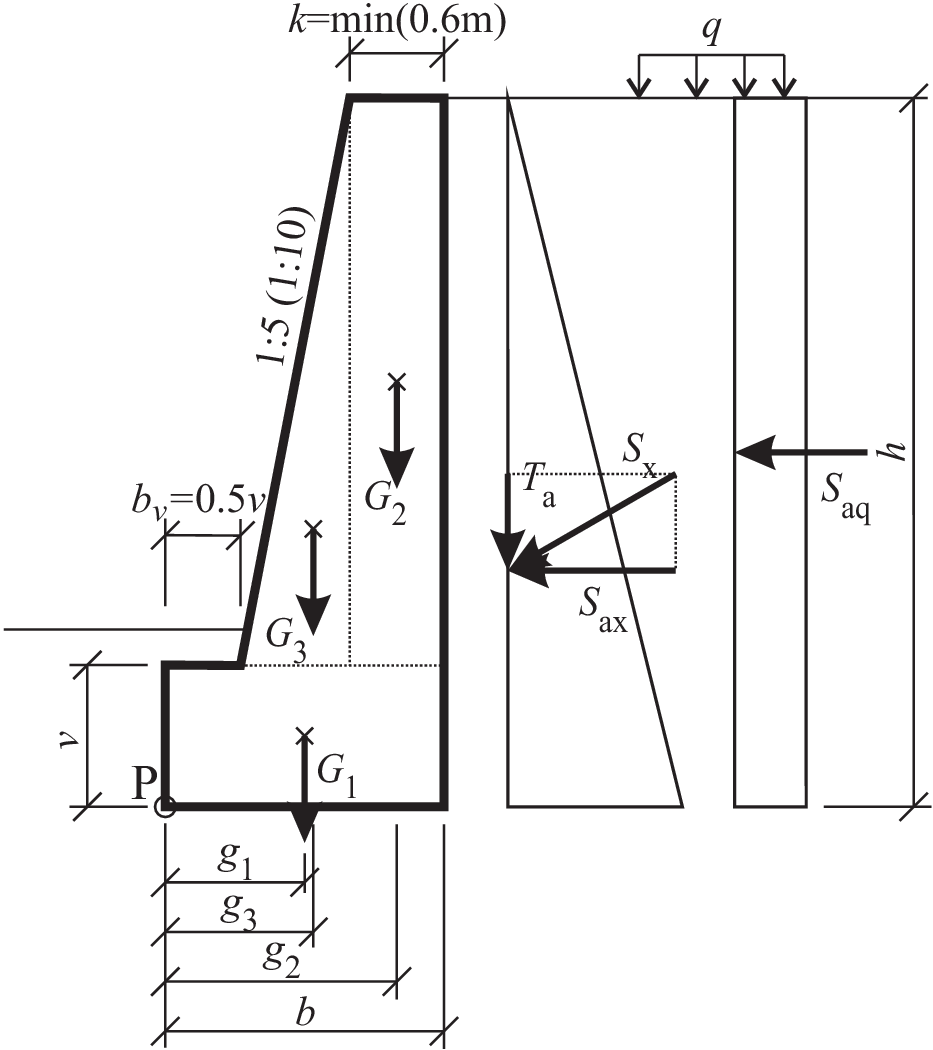
Posouzení opěrné stěny na únosnost v základové spáře provedeme podle následujícího postupu a uvedených vzorců. Označení geometrických rozměrů a sil je zřejmé z obrázku. Stěna je rozdělena na tři geometrické části, pro které vypočítáme vlastní tíhu a polohu těžiště od přední hrany základu (bod P) podle následujících vztahů: \begin{equation}\nonumber G_1 = v b \gamma_{\rm m} \quad G_2 = k \left( h-v \right) \gamma_{\rm m} \quad G_3 = \frac{1}{2}\left( h-v \right)\left( k + \frac{h}{10}\right)\gamma_{\rm m} \end{equation}
\begin{equation}\nonumber G = G_1 + G_2 + G_3 \end{equation}
\begin{equation}\nonumber g_1 = \frac{1}{2} b \quad g_2 = b - \frac{1}{2} k \quad g_3 = b_v + \frac{2}{3}\left( b - b_v -k \right) \end{equation}
Dále si vypočteme síly od zatížení zeminou, budeme uvažovat pouze aktivní zemní tlak za rubem stěny (pasivní tlak zeminy před konstrukcí stěny zanedbáme). Výslednice horizontálního účinku aktivního zemního tlaku působící na stěnu v jedné třetině výšky $h$: \begin{equation}\nonumber S_{\rm ax} = \frac{1}{2} \gamma_{\rm z} h^2 K_{\rm a} \qquad K_{\rm a} = \tan^2 \left( 45^\circ - \frac{\varphi}{2} \right) \end{equation} Výslednice od spojitého přitížení za rubem stěny v jedné polovině výšky $h$: \begin{equation}\nonumber S_{\rm aq} = q K_{\rm a} h \end{equation} Svislý účinek zeminy na stěnu: \begin{equation}\nonumber T_{\rm a} = S_{\rm ax} \tan{\delta} \qquad \delta = \left( \frac{1}{2} \div \frac{1}{3} \right) \varphi \end{equation} Moment k bodu P působící na stěnu: \begin{equation}\nonumber M_{\rm a} = G_1 g_1 + G_2 g_2 + G_3 g_3 - \frac{1}{3} h S_{\rm ax} - S_{\rm aq} \frac{h}{2} + T_{\rm a} b \end{equation} Svislá výslednice působící na základovou zeminu: \begin{equation}\nonumber V = G + T_{\rm a} %H = S_{\rm ax} \quad \end{equation} Efektivní plocha mezi základem a zeminou: \begin{equation}\nonumber A_{\rm ef}=b_{\rm ef} \cdot 1 = (b - 2e)\cdot 1 \quad e = \frac{1}{2} b - a \quad a = \frac{M_{\rm a}}{V} \end{equation} Posouzení únosnosti v základové spáře provedeme podle následující nerovnosti: \begin{equation}\nonumber \sigma = \frac{V}{A_{\rm ef}} < R, \end{equation} kde $\sigma$ je napětí v základové spáře od zatížení působícího na stěnu, které musí být menší než únosnost základové půdy $R$. Únosnost základové půdy budeme pro zjednodušení uvažovat jako náhodnou veličinu zadanou pomocí pravděpodobnostního rozdělení.
Náhodné veličiny¶
Všechny náhodné veličiny jsou uvažovány nezávislé.
| Name | Distribution | Mean | Std | CoV | min | max |
|---|---|---|---|---|---|---|
| $R$ | Lognormal | 315 | 37.8 | 0.12 | ||
| $\gamma_{\rm m}$ | Normal | 24 | 1.2 | 0.05 | ||
| $q$ | LogNormal | 4 | 0.4 | 0.1 | ||
| $\varphi$ | Truncated Normal | 33 | 4.95 | 0.15 | 31 | 36 |
| $\gamma_{\rm z}$ | Normal | 20 | 2 | 0.1 |
Vygenerování funkce dosazením všech mezivýpočtů do výsledné rovnice¶
d = OrderedDict(
k = '0.8', # sirka na vrcholu steny
gamma_m = 'gamma_m', # objemova tiha materialu steny
q = 'q', # spojite zatizeni za stenou
phi = 'phi', # uhel vnitrniho treni
gamma_z = 'gamma_z', # objemova tiha zeminy
h = '6.0', # vyska steny
v = '1.2', # vyska zakladu
sklon = '5', # sklon lice steny 1:5 az 1:10
# vypocet pomocnych hodnot pro vypocet napeti
# v zakladove spare od zemniho tlaku
# a spojiteho pritizeni za gravitacni stenou
bv = '0.5 * v', # sirka predsazeni zakladu
b = 'k + bv + h / sklon', # sirka zakladu
G1 = 'v * b * gamma_m',
G2 = 'k * (h - v) * gamma_m',
G3 = '1 / 2.0 * (h - v) * (k + h / sklon) * gamma_m',
G = 'G1 + G2 + G3', # vlastni tiha steny
# ramena vlastnich tih k bodu P
g1 = '1 / 2.0 * b',
g2 = 'b - 1 / 2.0 * k',
g3 = 'bv + 2 / 3.0 * (b - bv - k)',
# soucinitel aktivniho zemniho tlaku
K_a = 'pow((tan((45.0 - 0.5 * phi) / 180.0 * PI)), 2)',
# sila od zemniho tlaku
S_ax = '0.5 * gamma_z * pow(h, 2) * K_a',
S_aq = 'q * K_a * h',
# zanedbano
delta = '1/2.0 * phi',# 1/3 az 1/2 * phi
T_a = 'S_ax * tan(delta /180. * PI)',
V = 'G + T_a',
M = 'G1 * g1 + G2 * g2 + G3 * g3 - S_ax * h / 3.0 - S_aq * h / 2.0 + T_a * b',
a = 'M / V',
e = '1 / 2.0 * b - a', # excentricita
A_ef = 'b - 2.0 * e', # efektivni plocha
# napeti v zakladove spare
#sigma_v = 'V / A_ef'
)
sigma_v = 'V / A_ef'
for i in list(d.keys())[::-1]:
sigma_v = re.sub(r'([ (]+)(%s)([ ),]+)' % i, r'\1(%s)\3' % d.get(i), sigma_v)
sigma_v = re.sub(r'^%s ' % i, r'(%s) ' % d.get(i), sigma_v)
sigma_v = re.sub(r' %s$' % i, r' (%s)' % d.get(i), sigma_v)
print(sigma_v)
Řešení pomocí openturns¶
dim = 5 # počet náhodných veličin
# parametry vstupních náhodných veličin
mu_gamma_m = 24
cov_gamma_m = 0.05
std_gamma_m = mu_gamma_m * cov_gamma_m
mu_q = 4
cov_q = 0.1
std_q = mu_q * cov_q
mu_phi = 33
cov_phi = 0.15
min_phi = 31
max_phi = 36
std_phi = mu_phi * cov_phi
mu_gamma_z = 20
cov_gamma_z = 0.1
std_gamma_z = mu_gamma_z * cov_gamma_z
mu_R = 315
cov_R = 0.12
std_R = mu_R * cov_R
def regularFunc(x):
k = 0.8 # sirka na vrcholu steny
gamma_m = x[0] # objemova tiha materialu steny
q = x[1] # spojite zatizeni za stenou
phi = x[2] # uhel vnitrniho treni
gamma_z = x[3] # objemova tiha zeminy
R = x[4]
h = 6.0 # vyska steny
v = 1.2 # vyska zakladu
sklon = 5 # sklon lice steny 1:5 az 1:10
# vypocet pomocnych hodnot pro vypocet napeti
# v zakladove spare od zemniho tlaku
# a spojiteho pritizeni za gravitacni stenou
bv = 0.5 * v # sirka predsazeni zakladu
b = k + bv + h / sklon # sirka zakladu
G1 = v * b * gamma_m
G2 = k * (h - v) * gamma_m
G3 = 1 / 2.0 * (h - v) * (k + h / sklon) * gamma_m
G = G1 + G2 + G3 # vlastni tiha steny
# ramena vlastnich tih k bodu P
g1 = 1 / 2.0 * b
g2 = b - 1 / 2.0 * k
g3 = bv + 2 / 3.0 * (b - bv - k)
# soucinitel aktivniho zemniho tlaku
K_a = m.pow((m.tan((45.0 - 0.5 * phi) / 180.0 * m.pi)), 2)
# sila od zemniho tlaku
S_ax = 0.5 * gamma_z * m.pow(h, 2) * K_a
S_aq = q * K_a * h
# zanedbano
delta = 1/2.0 * phi# 1/3 az 1/2 * phi
T_a = S_ax * m.tan(delta /180. * m.pi)
V = G + T_a
M = G1 * g1 + G2 * g2 + G3 * g3 - S_ax * h / 3.0 - S_aq * h / 2.0 + T_a * b
a = M / V
e = 1 / 2.0 * b - a # excentricita
A_ef = b - 2.0 * e # efektivni plocha
# napeti v zakladove spare
sigma_v = V / A_ef
return [R - sigma_v]
limitStatePy = ot.PythonFunction(5, 1, regularFunc)
Varianta 2 - rychlejší¶
G = '''R - (((((1.2) * ((0.8) + (0.5 * (1.2)) + (6.0) / (5)) * (gamma_m)) +
((0.8) * ((6.0) - (1.2)) * (gamma_m)) +
(1 / 2.0 * ((6.0) - (1.2)) * ((0.8) + (6.0) / (5)) * (gamma_m))) +
((0.5 * (gamma_z) * 6^2 * ((tan((45.0 - 0.5 * (phi)) / 180.0 * _pi))^2)) *
tan((1/2.0 * (phi)) /180. * _pi))) /
(((0.8) + (0.5 * (1.2)) + (6.0) / (5)) - 2.0 *
(1 / 2.0 * ((0.8) + (0.5 * (1.2)) + (6.0) / (5)) -
((((1.2) * ((0.8) + (0.5 * (1.2)) + (6.0) / (5)) * (gamma_m)) *
(1 / 2.0 * ((0.8) + (0.5 * (1.2)) + (6.0) / (5))) + ((0.8) * ((6.0) - (1.2)) * (gamma_m)) *
(((0.8) + (0.5 * (1.2)) + (6.0) / (5)) - 1 / 2.0 * (0.8)) +
(1 / 2.0 * ((6.0) - (1.2)) * ((0.8) + (6.0) / (5)) * (gamma_m)) *
((0.5 * (1.2)) + 2 / 3.0 * (((0.8) + (0.5 * (1.2)) + (6.0) / (5)) - (0.5 * (1.2)) - (0.8))) -
(0.5 * (gamma_z) * (6.0)^2 * (((tan((45.0 - 0.5 * (phi)) / 180.0 * _pi))^2))) *
(6.0) / 3.0 - ((q) * (((tan((45.0 - 0.5 * (phi)) / 180.0 * _pi))^2)) * (6.0)) *
(6.0) / 2.0 + ((0.5 * (gamma_z) * ((6.0)^2) * (((tan((45.0 - 0.5 * (phi)) / 180.0 * _pi))^2))) *
tan((1/2.0 * (phi)) /180. * _pi)) * ((0.8) + (0.5 * (1.2)) + (6.0) / (5))) /
((((1.2) * ((0.8) + (0.5 * (1.2)) + (6.0) / (5)) * (gamma_m)) + ((0.8) * ((6.0) - (1.2)) * (gamma_m)) +
(1 / 2.0 * ((6.0) - (1.2)) * ((0.8) + (6.0) / (5)) * (gamma_m))) +
((0.5 * (gamma_z) * ((6.0)^2) * (((tan((45.0 - 0.5 * (phi)) / 180.0 * _pi))^2))) *
tan((1/2.0 * (phi)) /180. * _pi)))))))'''
limitState = ot.Function(['gamma_m', 'q', 'phi', 'gamma_z', 'R'], ['G'], [G])
limitState.enableHistory()
Otestování funkcí na středních hodnotách¶
x = [mu_gamma_m, mu_q, mu_phi, mu_gamma_z, mu_R]
print('x =', x)
print('G(x) =', limitState(x))
print('G(x) =', limitStatePy(x))
Definice pravděpodobnostních rozdělení náhodných veličin¶
gamma_m_dist = ot.Normal(mu_gamma_m, std_gamma_m)
gamma_m_dist.setDescription(['gamma_m'])
q_dist = ot.LogNormalMuSigma(mu_q, std_q).getDistribution()
q_dist.setDescription(['q'])
phi_dist = ot.TruncatedNormal(mu_phi, std_phi, min_phi, max_phi)
phi_dist.setDescription(['phi'])
gamma_z_dist = ot.Normal(mu_gamma_z, std_gamma_z)
gamma_z_dist.setDescription(['gamma_z'])
R_dist = ot.LogNormalMuSigma(mu_R, std_R).getDistribution()
R_dist.setDescription(['R'])
marginals = [gamma_m_dist, q_dist, phi_dist, gamma_z_dist, R_dist]
fig, ax = plt.subplots(ncols=3, nrows=2, figsize=(10,6), tight_layout=True)
View(gamma_m_dist.drawPDF(), axes=[ax[0, 0]], legend_kwargs=dict(loc='best'))
View(q_dist.drawPDF(), axes=[ax[0, 1]], legend_kwargs=dict(loc='best'))
View(phi_dist.drawPDF(), axes=[ax[0, 2]], legend_kwargs=dict(loc='best'))
View(gamma_z_dist.drawPDF(), axes=[ax[1, 0]], legend_kwargs=dict(loc='best'))
View(R_dist.drawPDF(), axes=[ax[1, 1]], legend_kwargs=dict(loc='best'));

Sdružené rozdělení pravděpodobnosti¶
# Create a copula : IndependentCopula (no correlation)
aCopula = ot.IndependentCopula(dim)
aCopula.setName('Independent copula')
# Instanciate one distribution object
myDistribution = ot.ComposedDistribution(marginals, aCopula)
myDistribution.setName('myDist')
RS = ot.CorrelationMatrix(4)
RS[2, 3] = -0.2
# Evaluate the correlation matrix of the Normal copula from RS
R = ot.NormalCopula.GetCorrelationFromSpearmanCorrelation(RS)
# Create the Normal copula parametrized by R
copula = ot.NormalCopula(R)
Náhodné vektory¶
- $G$ rezerva spolehlivosti
myEventpodmínka spolehlivosti $G < 0$
# We create a 'usual' RandomVector from the Distribution
vect = ot.RandomVector(myDistribution)
# We create a composite random vector
G = ot.RandomVector(limitState, vect) # pro použití varianty 1 limitStatePy
# We create an Event from this RandomVector
myEvent = ot.Event(G, ot.Less(), 0.0)
Metoda Monte Carlo¶
limitState.clearHistory()
cv = 0.05
NbSim = 1000000
experiment = ot.MonteCarloExperiment()
algoMC = ot.ProbabilitySimulationAlgorithm(myEvent, experiment)
algoMC.setMaximumOuterSampling(NbSim)
algoMC.setBlockSize(4)
algoMC.setMaximumCoefficientOfVariation(cv)
# For statistics about the algorithm
initialNumberOfCall = limitState.getEvaluationCallsNumber()
# Perform the analysis:
%time algoMC.run()
# Results:
resultMC = algoMC.getResult()
probability = resultMC.getProbabilityEstimate()
print('MonteCarlo result=', resultMC)
print('Number of executed iterations =', resultMC.getOuterSampling())
print('Number of calls to the limit state =', limitState.getEvaluationCallsNumber() - initialNumberOfCall)
print('Pf = ', probability)
print('CV =', resultMC.getCoefficientOfVariation())
algoMC.drawProbabilityConvergence()
inpMC = np.asarray(limitState.getHistoryInput().getSample())
outMC = np.asarray(limitState.getHistoryOutput().getSample())
#display(inp)
#display(out)
plot_grid(marginals, inpMC, outMC)

Metoda FORM - First Order Reliability Method¶
limitState.clearHistory()
# Using FORM analysis
# We create a NearestPoint algorithm
myCobyla = ot.Cobyla()
# Resolution options:
eps = 1e-3
niter = 1000
myCobyla.setMaximumIterationNumber(niter)
myCobyla.setMaximumAbsoluteError(eps)
myCobyla.setMaximumRelativeError(eps)
myCobyla.setMaximumResidualError(eps)
myCobyla.setMaximumConstraintError(eps)
# For statistics about the algorithm
initialNumberOfCall = limitState.getEvaluationCallsNumber()
# We create a FORM algorithm
# The first parameter is a NearestPointAlgorithm
# The second parameter is an event
# The third parameter is a starting point for the design point research
algoFORM = ot.FORM(myCobyla, myEvent, myDistribution.getMean())
# Perform the analysis:
algoFORM.run()
# Results:
resultFORM = algoFORM.getResult()
print('Number of calls to the limit state =', limitState.getEvaluationCallsNumber() - initialNumberOfCall)
print('beta =', resultFORM.getHasoferReliabilityIndex())
print('Pf =', resultFORM.getEventProbability())
standardSpaceDesignPoint = resultFORM.getStandardSpaceDesignPoint()
# Graphical result output
resultFORM.drawImportanceFactors()
inpFORM = np.asarray(limitState.getHistoryInput().getSample())
outFORM = np.asarray(limitState.getHistoryOutput().getSample())
#display(inp)
#display(out)
DP = resultFORM.getPhysicalSpaceDesignPoint()
plot_grid(marginals, inpFORM, outFORM, DP=DP)

Metoda LHS - Latin Hypercube Sampling¶
limitState.clearHistory()
cv = 0.05
nsim = 1000000
algoLHS = ot.LHS(myEvent)
algoLHS.setBlockSize(4)
algoLHS.setMaximumCoefficientOfVariation(cv)
algoLHS.setMaximumOuterSampling(nsim)
# For statistics about the algorithm
initialNumberOfCall = limitState.getEvaluationCallsNumber()
%time algoLHS.run()
# retrieve results
resultLHS = algoLHS.getResult()
probability = resultLHS.getProbabilityEstimate()
print('Number of calls to the limit state =', limitState.getEvaluationCallsNumber() - initialNumberOfCall)
print('Number of calls =', resultLHS.getOuterSampling())
print('CoV=', resultLHS.getCoefficientOfVariation())
print('Pf=', probability)
inpLHS = np.asarray(limitState.getHistoryInput().getSample())
outLHS = np.asarray(limitState.getHistoryOutput().getSample())
#display(inp)
#display(out)
plot_grid(marginals, inpLHS, outLHS)

Metoda Importance Sampling¶
- pro nalezení oblasti poruchy je využit návrhový bod z metody FORM
- váhová funkce
myImportanceje mnohorozměrné normální rozdělení se směrodatnou odchylkouimpstdpro všechny dimenze
limitState.clearHistory()
impstd = 1.0
myImportance = ot.Normal(standardSpaceDesignPoint, [impstd] * dim, ot.CorrelationMatrix(dim))
# Create a simulation algorithm
cv = 0.05
nsim = 10000
experiment = ot.ImportanceSamplingExperiment(myImportance)
algoIS = ot.ProbabilitySimulationAlgorithm(ot.StandardEvent(myEvent), experiment)
algoIS.setMaximumCoefficientOfVariation(cv)
algoIS.setMaximumOuterSampling(nsim)
algoIS.setConvergenceStrategy(ot.Full())
# For statistics about the algorithm
initialNumberOfCall = limitState.getEvaluationCallsNumber()
algoIS.run()
# retrieve results
resultIS = algoIS.getResult()
probability = resultIS.getProbabilityEstimate()
print('Number of calls =', resultIS.getOuterSampling())
print('CoV=', resultIS.getCoefficientOfVariation())
print('Pf=', probability)
inpIS = np.asarray(limitState.getHistoryInput().getSample())
outIS = np.asarray(limitState.getHistoryOutput().getSample())
#display(inp)
#display(out)
DP = resultFORM.getPhysicalSpaceDesignPoint()
plot_grid(marginals, inpIS, outIS, DP=DP)

METODA SORM - Second Order Reliability Method¶
limitState.clearHistory()
# Using SORM analysis
# We create a NearestPoint algorithm
myCobyla = ot.Cobyla()
# Resolution options:
eps = 1e-3
niter = 1000
myCobyla.setMaximumIterationNumber(niter)
myCobyla.setMaximumAbsoluteError(eps)
myCobyla.setMaximumRelativeError(eps)
myCobyla.setMaximumResidualError(eps)
myCobyla.setMaximumConstraintError(eps)
# For statistics about the algorithm
initialNumberOfCall = limitState.getEvaluationCallsNumber()
# We create a FORM algorithm
# The first parameter is a NearestPointAlgorithm
# The second parameter is an event
# The third parameter is a starting point for the design point research
algoSORM = ot.SORM(myCobyla, myEvent, myDistribution.getMean())
# Perform the analysis:
algoSORM.run()
# Results:
resultSORM = algoSORM.getResult()
print('Number of calls to the limit state =', limitState.getEvaluationCallsNumber() - initialNumberOfCall)
print('beta =', resultSORM.getGeneralisedReliabilityIndexBreitung())
print('Pf =', resultSORM.getEventProbabilityBreitung())
print('Pf =', resultSORM.getEventProbabilityHohenBichler())
print('Pf =', resultSORM.getEventProbabilityTvedt())
# Graphical result output
resultSORM.drawImportanceFactors()
inpSORM = np.asarray(limitState.getHistoryInput().getSample())
outSORM = np.asarray(limitState.getHistoryOutput().getSample())
#display(inp)
#display(out)
DP = resultSORM.getPhysicalSpaceDesignPoint()
plot_grid(marginals, inpSORM, outSORM, DP=DP)
Directional sampling¶
limitState.clearHistory()
# Using Directional sampling
# Resolution options:
cv = 0.05
NbSim = 100000
algoDS = ot.DirectionalSampling(myEvent)
algoDS.setMaximumOuterSampling(NbSim)
algoDS.setBlockSize(1)
algoDS.setMaximumCoefficientOfVariation(cv)
# For statistics about the algorithm
initialNumberOfCall = limitState.getEvaluationCallsNumber()
# Perform the analysis:
algoDS.run()
# Results:
resultDS = algoDS.getResult()
probability = resultDS.getProbabilityEstimate()
print('Number of executed iterations =', resultDS.getOuterSampling())
print('Number of calls to the limit state =', limitState.getEvaluationCallsNumber() - initialNumberOfCall)
print('Pf = ', probability)
print('CV =', resultDS.getCoefficientOfVariation())
algoDS.drawProbabilityConvergence()
inpDS = np.asarray(limitState.getHistoryInput().getSample())
outDS = np.asarray(limitState.getHistoryOutput().getSample())
#display(inp)
#display(out)
plot_grid(marginals, inpDS, outDS)

Fitting MC¶
factories = [ot.LogNormalFactory(), ot.NormalFactory(), ot.WeibullFactory()]
estimated_distribution, test_result = ot.FittingTest.BestModelKolmogorov(outMC, factories)
test_result
print('mu =', estimated_distribution.getMean())
print('sigma =', estimated_distribution.getStandardDeviation())
print('gamma_1 =', estimated_distribution.getSkewness())
print('gamma_2 =', estimated_distribution.getKurtosis())
pf = estimated_distribution.computeCDF(0)
print('pf =', pf)
fig, ax = plt.subplots(ncols=1, nrows=1, figsize=(8,4), tight_layout=True)
View(ot.VisualTest_DrawHistogram(outMC), axes=[ax], legend_kwargs=dict(loc='best'), plot_kwargs=dict(label='G histogram'))
View(estimated_distribution.drawPDF(), axes=[ax], legend_kwargs=dict(loc='best'), plot_kwargs={'color':'b', 'label': 'fitted PDF'})
ax.set_yscale('log')

Fitting LHS¶
factories = [ot.LogNormalFactory(), ot.NormalFactory(), ot.WeibullFactory()]
estimated_distribution, test_result = ot.FittingTest.BestModelKolmogorov(outLHS, factories)
test_result
print('mu =', estimated_distribution.getMean())
print('sigma =', estimated_distribution.getStandardDeviation())
print('gamma_1 =', estimated_distribution.getSkewness())
print('gamma_2 =', estimated_distribution.getKurtosis())
pf = estimated_distribution.computeCDF(0)
print('pf =', pf)
fig, ax = plt.subplots(ncols=1, nrows=1, figsize=(8,4), tight_layout=True)
View(ot.VisualTest_DrawHistogram(outLHS), axes=[ax], legend_kwargs=dict(loc='best'), plot_kwargs=dict(label='G histogram'))
View(estimated_distribution.drawPDF(), axes=[ax], legend_kwargs=dict(loc='best'), plot_kwargs={'color':'b', 'label': 'fitted PDF'})
ax.set_yscale('log')

Subset Sampling¶
limitState.clearHistory()
cv = 0.05
NbSim = 1000
algoSS = ot.SubsetSampling(myEvent)
algoSS.setBlockSize(1)
algoSS.setMaximumOuterSampling(NbSim)
algoSS.setMaximumCoefficientOfVariation(cv)
# For statistics about the algorithm
initialNumberOfCall = limitState.getEvaluationCallsNumber()
algoSS.run()
resultSS = algoSS.getResult()
probability = resultSS.getProbabilityEstimate()
print('Subset Sampling result=', resultSS)
print('Number of executed iterations =', resultSS.getOuterSampling())
print('Number of calls to the limit state =', limitState.getEvaluationCallsNumber() - initialNumberOfCall)
print('Pf = ', probability)
print('CV =', resultSS.getCoefficientOfVariation())
s = algoSS.getConvergenceStrategy()
algoSS.drawProbabilityConvergence()
inpSS = np.asarray(limitState.getHistoryInput().getSample())
outSS = np.asarray(limitState.getHistoryOutput().getSample())
#display(inp)
#display(outSS)
print(outSS.shape)
n = len(marginals)
nit = resultSS.getOuterSampling()
ns = algoSS.getNumberOfSteps()
print(ns, nit)
fig, ax = plt.subplots(nrows=int((n-1)*n/2), ncols=1, figsize=(4, n*4), tight_layout=True)
k = 0
for i in range(n-1):
for j in range(i+1, n):
mask = outSS[:,0] < 0
for l in range(ns):
r = np.s_[int(l*nit/ns):int(nit/ns*(l+1))]
ax[k].plot(inpSS[:, i][r], inpSS[:, j][r], ms=1, marker='.', ls='None')
#ax[k].plot(inpSS[:, i][mask], inpSS[:, j][mask], ms=1, marker='.', ls='None')
ax[k].set_xlabel(marginals[i].getDescription()[0])
ax[k].set_ylabel(marginals[j].getDescription()[0])
k+=1

Adaptive Directional Sampling¶
limitState.clearHistory()
cv = 0.05
NbSim = 1000
algoADS = ot.AdaptiveDirectionalSampling(myEvent)
#algoADS.setMaximumOuterSampling(NbSim)
#algoADS.setBlockSize(1)
#algoADS.setMaximumCoefficientOfVariation(cv)
# For statistics about the algorithm
initialNumberOfCall = limitState.getEvaluationCallsNumber()
# Perform the analysis:
%time algoADS.run()
# Results:
resultADS = algoADS.getResult()
probability = resultADS.getProbabilityEstimate()
print('Number of executed iterations =', resultADS.getOuterSampling())
print('Number of calls to the limit state =', limitState.getEvaluationCallsNumber() - initialNumberOfCall)
print('Pf = ', probability)
print('CV =', resultADS.getCoefficientOfVariation())
#algoADS.drawProbabilityConvergence()
inpADS = np.asarray(limitState.getHistoryInput().getSample())
outADS = np.asarray(limitState.getHistoryOutput().getSample())
#display(inp)
#display(out)
plot_grid(marginals, inpADS, outADS)
